Fernab jeder Steuerung arbeitet ein Unterwasserroboter seit wenigen Tagen in 2.500 Metern Wassertiefe am Meeresgrund der Arktis, nachdem er einen erfolgreichen Testlauf absolviert hat. Forscher und Ingenieure des Alfred-Wegener-Instituts, Helmholtz-Zentrum für Polar- und Meeresforschung (AWI) haben erstmals den Tiefsee-Crawler Tramper für eine ganzjährige vollständig autonome Mission ausgebracht. Der im Rahmen der Helmholtz-Allianz Robotische Exploration unter Extrembedingungen (ROBEX) entwickelte mobile Unterwasserroboter soll nun wöchentlich Sauerstoffmessungen im Meeresboden durchführen.
Autonom am Meeresgrund
Schlafen, fahren, fotografieren und messen – so einfach klingt die Aufgabenbeschreibung für den AWI-Tramper. Weil dieser Unterwasserroboter das Ganze in der arktischen Tiefsee bei einer Wassertemperatur nahe des Gefrierpunktes ein Jahr lang selbstständig durchführen soll, kommt bei den beteiligten Ingenieuren und Wissenschaftlern allerdings doch Nervosität auf. Deshalb stand auf dem Programm der Polarstern-Expedition PS99.2 zunächst ein Testlauf, den der AWI-Tramper erfolgreich absolvierte: Zwei Tage lang war er auf dem Meeresgrund in 1.500 Metern Tiefe unterwegs. Er legte insgesamt 123 Meter zurück, führte sieben Messzyklen durch und stellte so seine Funktionsfähigkeit unter Beweis.
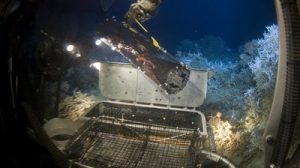
Entsprechend war der Weg frei, um den Unterwasserroboter am Abend des 11. Juli 2016 für seine lange Mission im Tiefseeobservatorium AWI-Hausgarten in einer Wassertiefe von 2.500 Metern auszubringen. Ein videogeführtes Aussetzsystem (der sogenannte Launcher) brachte den Crawler sicher an den Meeresgrund, wo er nun jede Woche seine Messungen durchführen soll. Dabei bewegt er sich zunächst 15 Meter, um eine ungestörte Fläche zu erreichen. Eine Bilderkennungskamera prüft dort die Oberfläche: Sollten Steine oder ähnliches zu erkennen sein, fährt Tramper noch einmal zwei Meter weiter. Anschließend erfolgt eine hochauflösende Fotografie der Messstelle, bevor die eigentliche Messung beginnt. Dabei werden Sensoren in kleinen Schritten von 0,1 Millimeter in das Sediment gefahren, die die Sauerstoffverteilung im Meeresboden messen.
Energiesparen im Schlaf
„Nach der Messung legt sich Tramper für ein Woche schlafen, um Energie zu sparen. Schließlich soll er über 52 solcher Messzyklen durchführen – und das bei einer Temperatur von minus 1,8 Grad Celsius, die die Batterien stark fordert“, sagt Dr. Frank Wenzhöfer, Biologe in der Helmholtz-Max-Planck Brückengruppe für Tiefsee-Ökologie und -Technologie. Die Wissenschaftler wollen mit den Tramper-Messungen die Aktivität der Mikroorganismen am Meeresboden erforschen.
Für den Abbau an organischem Material im Tiefseemeeresboden sind vor allem Mikroorganismen verantwortlich. Bakterien setzen die Reste toter Algen und Tiere um und verbrauchen dabei den Sauerstoff im Meeresboden. Je nachdem wie viel tote Algen am Meeresboden ankommen, desto stärker oder geringer ist die Bakterienaktivität und damit die Sauerstoffzehrung. „Diese natürliche Schwankung über das Jahr wollen wir mit den Messungen von Tramper ermitteln“, erläutert Frank Wenzhöfer die wissenschaftlichen Ziele des Einsatzes. „Darüber lassen sich Aussagen treffen, wie das Ökosystem des arktischen Meeresbodens auf Umweltveränderungen reagiert. Solche Daten fehlen uns noch gänzlich für die Arktis“, so der Mikrobiologe weiter.
Mit mehreren Sensoren gleichzeitig
„Für Untersuchungen der Tiefsee-Ökologen haben wir einen neuartigen Multi-Sensorrevolver entwickelt, der die gleichbleibende Qualität der Messungen garantieren soll“, berichtet AWI-Ingenieur Dr. Johannes Lemburg von den Entwicklungsarbeiten, die im Rahmen der Helmholtz-Allianz Robotische Exploration unter Extrembedingungen (ROBEX) stattfanden. „Er ermöglicht es, mit drei Sensoren gleichzeitig zu messen und diese nach einer vorprogrammierten Anzahl an Messungen auszutauschen. Ein solcher Sensortausch kann sechs Mal erfolgen, so dass insgesamt 18 Sensoren zum Einsatz kommen“, erklärt Johannes Lemburg das ausgeklügelte System.
Ingenieure und Wissenschaftler sind schon heute gespannt auf ihre nächste Expedition im kommenden Jahr: „Im Sommer 2017 werden wir mit der Polarstern in den AWI-Hausgarten zurückkehren und den Tramper hoffentlich heil und mit wertvollen Daten gespickt wieder aufnehmen können!“
(Alfred-Wegener-Institut, Helmholtz-Zentrum für Polar- und Meeresforschung, 18.07.2016 – NPO)