Schlau im Schwarm: US-Forscher haben den bisher größten Schwarm autonomer Mini-Roboter geschaffen. Die „Kilobots“ werden nur durch simpelste Sensoren und einen Algorithmus gesteuert, bilden aber im Schwarm selbstständig komplexe Formen aus. Dieser Tausend-Bot-Schwarm sei ein wichtiger Schritt hin zur Nachbildung der Schwarmintelligenz der Natur, konstatieren die Forscher im Fachmagazin „Science“.
In der Natur ist die Selbstorganisation von vielen einfachen Einheiten zu komplexen Gebilden ein alltägliches Phänomen – vom mehrzelligen Körper bis zu den Schwärmen von Vögeln oder Fischen reicht das Spektrum. In der Robotik wird versucht, diese Schwarmintelligenz technisch nachzuahmen: Einzelne Roboter erhalten dabei typischerweise nur wenige grundlegende Fähigkeiten – gehen, stoppen, Nachbarn erkennen und ähnliches. Ein Algorithmus gibt ihnen zudem einfache Handlungsanweisungen, die im Kollektiv umgesetzt dann zu einer Selbstorganisation des Schwarms führen.
Bisher allerdings umfassen die meisten Bot-Schwärme nur 10 bis 50 Roboter, nur wenige erreichen mehr als 100, wie die Forscher erklären. Das Problem liegt in den Kosten: Je mehr die Roboter können, desto teurer wird es, sie in großer Stückzahl herzustellen. Das aber bedeutet, dass Roboterforscher ihre Algorithmen zur Selbstorganisation bisher nicht in größerem Maßstab ausprobieren können. „Wir können das Verhalten großer Roboterschwärme zwar simulieren, aber die Aussagekraft solcher Simulationen hat Grenzen“, sagt Koautorin Radhika Nagpal.
{2}
Kilobots: Simpel, aber effektiv
Rubinstein und seine Kollegen sind daher einen anderen Weg gegangen: Sie produzierten extrem primitive, kleine Roboter, diese aber gleich in mehr als tausendfacher Stückzahl. Jeder einzelne dieser nur gut zwei Zentimeter kleinen „Kilobots“ besitzt nicht einmal Räder, sondern bewegt sich durch einen kleinen Vibrationsmotor auf drei dünnen Stelzen fort. Informationen über seine Umgebung erhält er nur über einen Infrarotsensor, der ihm die Anwesenheit von Artgenossen in der unmittelbaren Umgebung verrät.
Jeder Kilobot wird durch einen Algorithmus geleitet, der im Prinzip nur drei Verhaltensanweisungen enthält: Bewege dich am Rand einer Gruppe entlang, halte dich möglichst eng an deine Artgenossen und bestimmte deine relative Position im Verhältnis zu den anderen. Zusätzlich liefert der Algorithmus die Information über die Form, die der Bot-Schwarm annehmen soll, und deren Position.
Vom Haufen zur Form
Der Selbstorganisationsprozess beginnt mit vier „Saat“-Robotern, die an den Rand der ungeordneten Robotergruppe gesetzt werden. Diese unbeweglichen Kilobots dienen als Startpunkt und Referenzort für einen Ecke der Zielform. Der Rest geschieht nun ganz von allein: Nach und nach gleiten immer mehr Kilobots am Rand der Gruppe entlang zu den Saatrobotern und bleiben stehen, wenn sie eine Position erreichen, die innerhalb der Zielform liegt.
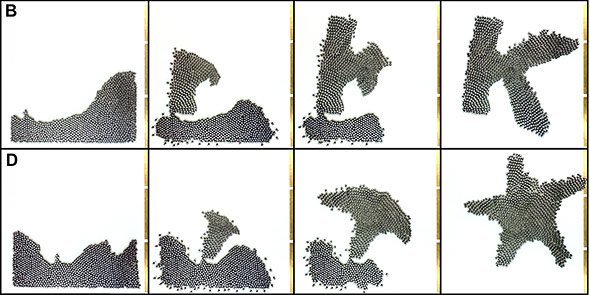
Durch diesen allmählichen Organisationprozess bilden die 1.024 Kilobots innerhalb von zwölf Stunden die gewünschte Form – beispielsweise den Buchstaben „K“ oder einen fünfzackigen Stern. „In allen Experimenten entstanden die gewünschten Formen ohne menschliche Intervention“, betonen die Forscher. Das Austauschen von Batterien oder eine Reprogrammierung waren nicht nötig. Selbst wenn einzelne Roboter sich verirren, stecken bleiben oder kurzfristig aus der Bahn geraten, stoppt dies den Selbstorganisationsprozess zudem nicht.
„Wir werden künftig immer häufiger größere Gruppen von zusammenarbeitenden Robotern erleben – ob es sich um Hunderte handelt, die bei Umweltsanierungen oder Katastrophen helfen oder um Millionen von selbststeuernden Autos auf unseren Straßen“, so Nagpal. Zu verstehen, wie sich solche Systeme robust und sicher steuern lassen, werde daher immer wichtiger. (Science, 2014; doi: 10.1126/science.1254295)
(Science / Harvard University, 15.08.2014 – NPO)