Präzision, Mathematik und Analyen gehören zu den Stärken der Roboter – Computer eben. Aber bewegen? Wie sollen Metallkästen fahren können, geschweige denn laufen? Hat die Realität die Hollywood-Fantasien der 1970’er eingeholt und rollende R2D2s oder C3POs mit staksigem Schritt und wild fuchtelnden Armen sollen uns zu Hilfe eilen?
Mit Rad und Kettenantrieb…
Die Roboter-Spezies scheidet sich auch nach „Star Wars“ immer noch in laufende oder fahrende Modelle. Von Spielzeug-Jeeps auf Monster-Rädern und Mini-Panzern mit Kettenantrieb bis zu tonnenschweren Bomben-Entschärfern rollen heute Generationen von Robotern durch Laborflure, Testanlagen und Geröllgebiete. Der Rad- und Kettenantrieb gilt für Wissenschaftler als einfachste Fortbewegungsmethode der elektronischen Helfer, da sie damit einfach und schnell vorankommen.
Die bislang einzigen offiziellen Rettungs-Roboter sind daher auch fahrende Hightech Labors in der Größe eines Schuhkartons. Die „Micros“ von CRASAR konnten aufgrund ihrer Größe in den Trümmern des World Trade Centers auch in die Nischen und Ecken vordringen, wo weder Rettungskräfte noch Spürhunde hinkamen. Mit ihrem Rad- oder Kettenantrieb fuhren sie über zerstörte Betonplatten, Kabelbäume und Eisenträger. Doch schwieriger waren dagegen größere Hindernisse, Drahtgeflechte und sehr loser, bröckeliger Untergrund.
…oder im Zweibeingang
Da wo Räder und Ketten versagen, können Roboter-Beine besser reagieren. Doch die Schritte der künstlichen Zweibeiner wirken meist unsicher und steif. Sowohl der komplexe Bewegungsablauf der verschiedenen Gelenke und die Feinabstimmung der einzusetzenden Kräfte überfordern meist die elektronische Steuerung eines Roboters. Die berühmtesten Humanoiden sind bislang wohl „Asimo“ von Honda und QRIO von Sony in ihren weißen „Astronautenanzügen“. Sie laufen sicher auf zwei Beinen, können Treppen gehen und Seilspringen. Aber auch für sie stellt das Gleichgewicht das größte Problem dar. Selbst ihr relativ runder Schrittrhythmus kann die Störung durch Unebenheiten, eine zusätzliche Tragelast oder herabfallende Gegenstände nicht ausgleichen. Der Laufroboter stürzt.
Sicherer aber langsam
Ein Roboter während einer Rettungsaktion selbst in Not? Wohl kein Fortschritt in der Katastrophenhilfe. Daher hat die moderne Forschung den Laufrobotern Beine gemacht: Zur Stabilisierung stehen sie jetzt auf vier, sechs oder acht Stützen. Der Schreitroboter „Katharina“ der Fraunhofer Gesellschaft etwa, bewegt sich auf sechs Beinen stabil und sicher auch in unwegsamem Gelände. Wie der Bewegungsablauf gleicht auch der Körperbau dem einer Spinne. Die langen Beine mit je einem Kraftsensor tragen einen fast runden Körper auf etwa 30 Zentimeter Höhe, an dem Werkzeug und zusätzliche Batterien befestigt werden können. Aufgrund der Kraftsensoren passt „Kathrina“ die Belastung der einzelnen Beine an wechselnde Untergründe an und kann problemlos Treppen und beinhohe Hindernisse meistern. Die Bewegungen sind jedoch schwerfällig und langsam. Gerade mal 0,4 Stundenkilometern schafft sie und muss dabei auch noch durch einen „Steuermann“ am Joystick geleitet werden.
Der Natur abgeschaut
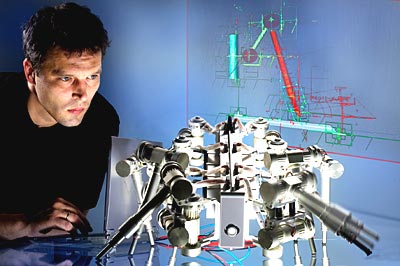
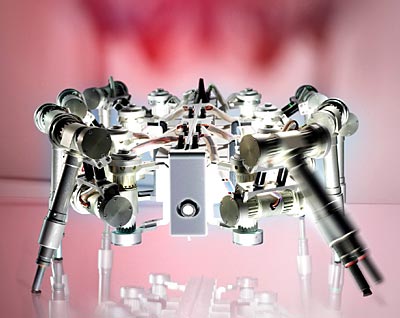
Weiter ist da schon der nach dem Vorbild seines biologischen Namensvetters konstruierte „Scorpion“ der Uni Bremen. Der schmale längliche Körper, acht abgeknickte Beine und bald noch einen Schwanz mit Kameraauge: Fertig ist der mechanische Scorpion. Professor Frank Kirchner und sein Team arbeiten zusammen mit der NASA an dem zurzeit hoffnungsvollsten Projekt mehrbeiniger Roboter. Der Grund für den „tierischen“ Erfolg ist das Steuerungssystem des Roboters: Kirchner und der Softwareentwickler Dirk Spenneberg haben ihre Vorlage in der Natur, das Stacheltier, ganz genau untersucht: Das extrem kleine Großhirn der Stacheltiere kann sich nicht um alle notwendigen Bewegungen kümmern, und hat deshalb die Steuerung Laufbewegung teilweise in die Beine ausgegliedert.
Das Bremer Team hat dieses Naturvorbild in Robotik umgesetzt, und noch erweitert. Für die Beine programmierten sie „Rhythmische Bewegungsgrundmuster“ (RMG), die ein autonomes Laufen des Scorpions ermöglichen, ohne dass er von einem zentralen Rechner gesteuert werden muss. Die Bewegung läuft daher sozusagen „unbewusst“ ab. Selbst wenn der Roboter durch ein Hindernis stolpert, reagiert er automatisch auf die neue Situation und stabilisiert sich in dem er beispielsweise das betroffenene Bein anzieht oder die anderen stärker streckt. Das gehört zu den „Reflexen“, die Spenneberg als Notfallprogramm den RMGs hinzugefügt hat. Dadurch kann der Scorpion relativ eigenständig laufen, Hindernisse überwinden und sich plötzlichen Veränderungen anpassen.
Weiter reichende Entscheidungen kann das biometrische System allerdings nicht treffen. Deshalb setzte das Scorpion-Team noch eine zentrale Kontrollebene ein, die mit einzelnen Befehlen eine Serie von Bewegungsmustern steuert. Die so genannten „Posture Motion Behaviors" (PMB) bilden eine Schnittstelle zwischen Roboter und dem Benutzer, der damit Scorpion besonderen Situationen anpasst. Auf Befehl streckt sich ein einzelnes Bein in die Höhe, um einen Gegenstand auf dem Rücken festzuhalten, während die übrigen sieben automatisch weiter laufen.
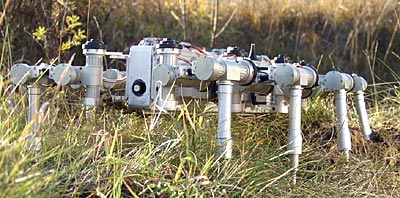
In unwegsamem Gelände spielt Scorpion seine großen Stärken aus. Beim laufen über Geröll, Sand, Schlamm oder Abhänge passt er seine Laufart selbstständig an und hält dabei die vorgegebene Haltung und Geschwindigkeit ein. Fähigkeiten die Kirchner im Uni-Projekt „Rescue Robotics“ in den Dienst des Katastrophenschutzes und der Rettungshilfe stellt. Bei den Robotermeisterschaften German Open 2005 waren die Studenten des Bremer Wissenschaftlers die Ersten mit einem Roboter auf Beinen – und belegten den dritten Platz. Bei der RoboCup Weltmeisterschaft 2006 soll der vierbeinige Roboter „Aimee“ endgültig die rollende Konkurrenz überlaufen.
Stand: 10.03.2006










