Ein völlig neues Design für Roboterarme, das sich hervorragend auf aktive Prothesen und Exoskelette übertragen lässt, haben jetzt deutsche Forscher entwickelt. Kernstück der Entwicklung sind so genannte „DOHELIX-Muskeln“, neue technische Muskeln, die einen künstlichen Ellbogen strecken und beugen können.
Das Funktionsprinzip des DOHELIX-Muskels ist einfach: Eine hochfeste, hochflexible Schnur verbindet zwei zueinander bewegliche Teile. In der Schnurmitte ist eine Antriebswelle befestigt. Wenn sie sich dreht, wickelt sie die Schnur von beiden Seiten auf und zieht die Schnurenden zusammen. DOHELIX heißt der Muskel, weil sich die Schnur in Form einer doppelten Helix auf die Welle wickelt.
Als Antrieb eignen sich elektrische Kleinmotoren ohne oder mit Getriebe kleiner Untersetzung, so die Wissenschaftler vom Fraunhofer-Institut für Produktionstechnik und Automatisierung IPA. Ihr Wirkungsgrad liegt bei hochwertigen Modellen über 80 Prozent und sie können kurzzeitig und wiederkehrend mit einem Vielfachen ihres Nennmoments überlastet werden. Wenn die Motorwicklungen nicht zu heiß werden und Zeit haben, sich bei längerer Überlastung abzukühlen, gibt es keine weiteren Anforderungen.
Insofern ähnelt DOHELIX menschlichen Skelettmuskeln: auch sie können kurzzeitig große Kräfte aufbringen, brauchen aber danach Ruhephasen zur Erholung. Elektrische Kleinmotoren sind robust, wartungsfrei und sehr einfach steuerbar – wie geschaffen für mobile Anwendungen. Ein Prothesenträger benötigt lediglich ein kleines Steuergerät und eine Batterie am Gürtelclip. Mit wenigen konstruktiven Maßnahmen könnten Prothesenträger damit auch Duschen und Schwimmen gehen.
Kostengünstige Produktion möglich
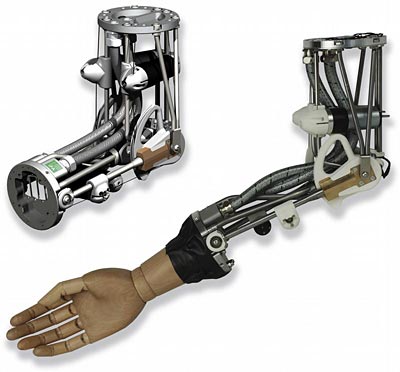
Ein künstliches Ellbogengelenk namens ISELLA – ein Akronym für „intrinsically safe lightweight lowcost arm“ zeigt, wie die Muskeln funktionieren. ISELLA hat vier DOHELIX-Muskeln – zwei Beuger und zwei Strecker. Der am Fraunhofer IPA entwickelte Ellbogen-Prototyp kann sich strecken (0°) und beugen (135°) und den Unterarm über Elle und Speiche verdrehen (+/- 75°). Die gleichzeitige Kontraktion beider Beuger hebt den Unterarm und die Kontraktion des linken (rechten) Beugers und des rechten (linken) Streckers verdreht den Unterarm.
Einer kostengünstigen Produktion der in vielen Eigenschaften ihren biologischen Vorbildern sehr nahe kommenden Prothese steht nach Angaben der IPA-Forscher nichts im Weg: Die Funktions- und Strukturbauteile von ISELLA sind in hohen Stückzahlen optimiert. Die meisten Bauteile sind entweder Normteile oder Teile, die mit wenigen Bearbeitungsschritten herstellbar sind.
(idw – Fraunhofer-Institut für Produktionstechnik und Automatisierung IPA, 17.07.2007 – DLO)









