Von der Natur abgeschaut: Das einzigartige Gelenksystem der Spinnen verleiht nun auch Robotern mehr Schnelligkeit, Leichtigkeit und Kraft. Denn Forscher haben nun Soft-Roboter und robotische Greifhände konstruiert, deren elektrohydraulische Gelenke nach dem Vorbild der Spinnen funktionieren. Dadurch können die Roboter trotz ihres filigranen Baus zehnmal höher springen als ihre Körpergröße, aber auch zerbrechliche Objekte fassen, ohne sie zu zerstören.
Softbots sind im Kommen: Immer mehr Roboter nutzen statt starrer Metallteile flexible Polymere und Funktionsprinzipien der Natur. So haben Wissenschaftler bereits autonome Mini-Roboter nach Oktopus-Vorbild, tiefseetaugliche Fisch-Roboter oder einen nahezu unzerstörbaren Gummi-Roboter gebaut. Angetrieben werden diese Softbots nicht durch Motoren, sondern durch hydraulische, pneumatische oder auch piezoelektrische Systeme. Sogar Zwitterkonstrukte aus Polymer mit echten Muskelzellen gibt es schon.
Allerdings haben diese Antriebstechniken einige Nachteile: Pneumatik braucht viel Platz, Piezoelemente haben nur einen begrenzten Bewegungsradius und Hydraulik ist häufig eher langsam.
Was Spinnengelenke so einzigartig macht
Eine Lösung könnte nun eine Technik bieten, die die Natur schon seit Millionen Jahren erfolgreich einsetzt: die Beinkonstruktion der Spinnen. „Anders als die meisten Tiere, die antagonistische Muskelpaare für Bewegungen nutzen, bewirken Spinnen das Strecken ihre Beine mit einem hydraulischen Mechanismus, während elastische Bänder oder Muskeln das Beugen übernehmen“, erklären Nicholas Kellaris von der University of Colorado und seine Kollegen.
Diese Kombination verleiht den Spinnen einerseits die Präzision und Feinfühligkeit, um fragile, komplexe Netze zu weben und darauf entlang zu balancieren. Andererseits geben diese Gelenke ihnen die Kraft und Schnelligkeit, die sie für die Jagd nach Beute benötigen. Ob diese Technik auch einem Soft-Roboter Vorteile bringen kann, haben Kellaris und sein Team nun mithilfe verschiedener Softbot-Varianten mit Gelenken nach Spinnenart getestet.
Weicher Beutel, elastisches Gelenk
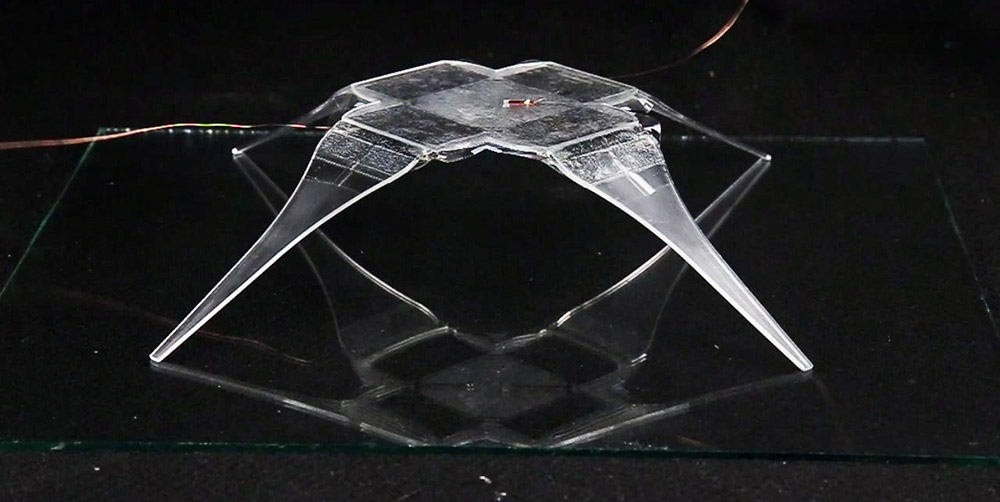
Das Gelenksystem der Softbots besteht aus zwei flachen, festen Plastikteilen, die über ein elastisches Polymerstück miteinander verbunden sind. Unterhalb dieses Gelenks sitzt ein flexibler Beutel, der mit einem nichtleitenden Öl gefüllt ist und an dem außen und innen eine Elektrode anliegt. Wird nun Strom auf die Elektroden gegeben, entsteht ein elektrisches Feld, dass die Elektroden zueinander zieht und zur Verformung des Beutels führt. Dadurch wird eine Zugkraft erzeugt, die das Gelenk beugt.
Sobald der Strom wieder abgeschaltet wird, entspannt sich das Gelenk und streckt sich wieder. Im Prinzip funktioniert es damit genau umgekehrt wie bei der Spinne, aber mit der gleichen Kombination aus Hydraulik und elastischen Elementen. „SES-Gelenke sind sehr einfach und leicht, da es keine peripheren Komponenten gibt, die den Roboter beschweren“, erklärt Koautor Christoph Keplinger vom Max-Planck-Institut für Intelligente Systeme in Stuttgart.
Große Schnellkraft und trotzdem sanft
Wie erste Tests ergaben, können sich die elektrohydraulischen Softbot-Gelenke auf 70 Grad beugen und benötigen dafür nur zwölf bis 30 Millisekunden. Sie entwickeln zudem genügend Kraft, um einen kleinen Arachno-Bot nach Spinnenvorbild das 14-Fache seiner eigenen Höhe in die Luft springen zu lassen. Die gewichtsbezogene Leistung liegt bei 230 Watt pro Kilogramm – das komme der des menschlichen Muskels nahe, so die Forscher.
Gleichzeitig lassen sich mit diesen Gelenksystemen auch präzise, dosierte Bewegungen durchführen, wie der Prototyp einer Greifhand belegt. Er besteht aus drei Fingern mit jeweils zwei Gelenken. Im Test hob diese Greifhand so unterschiedliche Objekte wie eine Erdbeere, einen Apfel und eine Kaffeetasse an, ohne dass sie herausrutschten oder zerquetscht wurden. „Die Kombination von starren und weichen Strukturen erlaubt eine effektive Kraftübertragung, verleiht der Konstruktion aber dennoch genügend Nachgiebigkeit“, so das Team.
Vielseitig anwendbar und günstig
Nach Ansicht der Wissenschaftler könnten solche Gelenksysteme nach Spinnenvorbild vor allem dort nützlich sein, wo kleine und leichte, aber trotzdem vielseitige Roboter benötigt werden. Sie könnten beispielsweise autonome Softbots antreiben, die unwegsame oder enge Räume erkunden, aber auch neuartige Greifer ermöglichen. Kombiniert man die Gelenksysteme mit elektrostatischen Aktuatoren, könnte man 50 Prozent der Energie wieder zurückgewinnen und die Roboter sogar noch energiesparender machen.
„Diese von Spinnen inspirierten Gelenke sind sehr leistungsstark, verbrauchen wenig Energie und sie sind einfach und billig herzustellen – wir verwenden Kunststoffe, mit denen auch Lebensmittel verpackt werden“, erklärt Keplinger. „Die Produktion der Gelenke wäre also leicht skalierbar.“ (Advanced Science, 2021; doi: 10.1002/advs.202100916)
Quelle: Max-Planck-Institut für Intelligente Systeme