
Roboterarme sind nicht nur teuer, sondern manchmal auch gefährlich: Denn funktionieren sie nicht richtig oder arbeiten ungenau, können sie Menschen verletzen. Ein neu entwickelter bionischer Roboterarm jedoch schont Mensch und Geldbeutel. Als Vorbild für den Greifer diente ein Wunderwerk der Natur: der Elefantenrüssel.
Er ist lang, grau, weich und aufgrund seiner rund 40.000 Muskeln äußerst beweglich: Der Elefantenrüssel. Für die Dickhäuter ist ihr Rüssdel ein Mehrzweckwerkzeug: Sie drücken damit Bäume um und tragen schwere Lasten, können aber auch sehr feinfühlige Bewegungen machen, greifen und trinken. Wissenschaftler vom Fraunhofer-Institut für Produktionstechnik und Automatisierung IPA in Stuttgart nahmen sich nun den Rüssel zum Vorbild für eine technische Neuentwicklung. „Der weiche und bewegliche Elefanten-Rüssel lieferte uns die Idee für den bionischen Roboterarm ISELLA“, sagt Harald Staab, der die Technologie am IPA erfunden und entwickelt hat.
Bisher bergen Roboterarme eine Verletzungsgefahr für nebenstehende Menschen – etwa wenn sie sich bei Störungen unkontrolliert bewegen. Nicht so bei ISELLA. Denn während herkömmliche Roboterarme nur einen Antrieb pro Gelenk haben, gibt es hier zwei: Jeder Antrieb hat einen Gegenspieler, so dass bei Störung des einen der andere eine unkontrollierte Bewegung des Gelenks verhindert.
„Muskelantrieb“ statt Hydraulik
„Im Gegensatz zu pneumatischen und hydraulischen Antrieben funktioniert unser Roboterarm mit einem einfachen und preisgünstigen Muskelantrieb – aus einem kleinen Elektromotor mit Antriebswelle und einer Spezialschnur“, erläutert Staab. Die Schnur ist wie eine Sehne zwischen zwei zueinander beweglichen Teilen befestigt. Die Antriebswelle wird an der Schnurmitte festgemacht. Wenn sie sich dreht, wickelt sich die Schnur in Form einer doppelten Helix von beiden Seiten auf. Die Forscher sprechen von „Dohelix“.
„Die Welle ist etwa so dünn wie die Schnur und bricht trotzdem nicht. Dadurch gibt es eine große Übersetzung wie bei einem Getriebe“, sagt der Experte. Erreicht haben die Forscher dies durch extrem reißfeste und flexible Materialien, die auch beim Segelsport und Drachenfliegen verwendet werden. Der Vorteil: „Dohelix“ ist wesentlich preisgünstiger und energieeffizienter als ein Getriebe. Die Zugkraft beträgt ein Zigfaches des Eigengewichts und das Antriebsprinzip des „Dohelix“ eignet sich für alle Größenordnungen – vom Mikrometermuskel bis zum Lastenheben im Containerhafen.
Einsatz für Prothesen
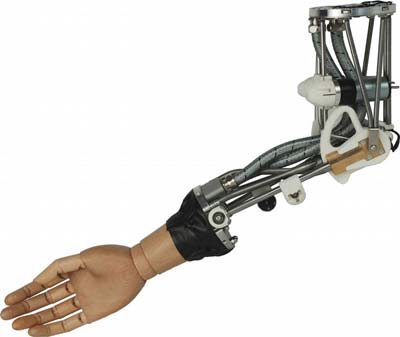
Der Roboterarm ISELLA besteht aus insgesamt zehn dieser „Dohelix“- Muskeln: Jeweils einem Beuger und einem Strecker für jedes Gelenk – vier für den Ellbogen und sechs für den Oberarm. Die Beweglichkeit entspricht der des menschlichen Arms. „Derzeit realisieren wir den Ellbogen“, sagt der Experte. Einsatzmöglichkeiten für ISELLA liegen in der Rehabilitation, etwa um verletzte Gelenke wieder zu trainieren, und in Prothesen, die beweglich und preisgünstig sind. In etwa zwei Jahren könnten solche Prothesen auf dem Markt sein, hofft Staab.
(Fraunhofer Gesellschaft, 11.07.2007 – NPO)














