Vielseitiger Winzling: In Zukunft könnten winzige Soft-Roboter durch unseren Körper wandern und Arzneien direkt ans Zielorgan bringen. Eine Vorform solcher Mikro-Softbots haben jetzt deutsche Forscher konstruiert. Ihr nur vier Millimeter kleiner Roboter ist wendig wie eine Raupe und kann laufen, springen und schwimmen – seine Bewegung lässt sich flexibel selbst an komplexe Umgebungen anpassen. Zudem kann das kleine Polymerkonstrukt auch Lasten tragen oder Dinge greifen, wie die Forscher im Fachmagazin „Nature“ berichten,
Soft-Bots sind im Kommen: Statt klobiger Metallkonstrukte bestehen die neuesten Roboter aus flexiblen Polymeren. Einige können dadurch ihre Körperform anpassen und sich wie eine Schlange durch schmalste Öffnungen winden. Andere schwimmen wie ein Oktopus durch das Wasser oder kriechen vom Licht angetrieben über den Untergrund. Und ein robuster Silikon-Softbot übersteht sogar Feuer, Eis und das Überfahrenwerden.
Wendig wie eine Raupe
Doch es geht noch vielseitiger: Wenqi Hu und seine Kollegen vom Max-Planck-Institut für Intelligente Systeme in Stuttgart haben eine Soft-Roboter konstruiert, der winzig klein ist, enorm beweglich und sogar Lasten tragen kann. Mit Leichtigkeit bewegt sich dieser Mini-Roboter selbst in einer komplexen Umwelt fort – ob auf einer Oberfläche oder in einer Flüssigkeit.
Der neue Softbot ist nur vier Millimeter groß und flach wie ein Blatt Papier. Er besteht aus einem weichen, elastischen Polymer, wodurch er sich wie eine Raupe krümmen und schlängeln kann. Für die Steuerung des Roboters haben die Forscher in seine Polymerschicht magnetische Nanopartikel eingebettet. Diese Partikel reagieren auf ein von außen einwirkendes Magnetfeld und beeinflussen so kontrolliert die Form und Bewegung des winzigen Softbots.
Laufen, schwimmen, tragen und greifen
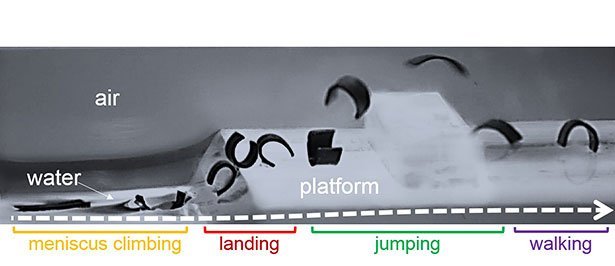
Das Besondere daran: Durch diese Konstruktion lässt sich die Fortbewegungsart des Roboters flexibel anpassen. Während bisherige Kleinstroboter in unwegsamem Terrain oft an ihre Grenzen stoßen, kann der Mini-Softbot leicht von einem Fortbewegungsmodus zum anderen wechseln: Er kann auf Oberflächen laufen oder rollen, über Hindernisse springen und durch enge Röhren krabbeln. Aber auch auf oder in einer Flüssigkeit schwimmt er problemlos, wie Tests ergaben.
Praktisch auch: Der neue Soft-Roboter ist in der Lage, kleine Lasten aufzuheben, zu transportieren und anderswo abzulegen. Zudem kann er durch Einkrümmen auch wie ein kleiner Greifarm arbeiten und Objekte greifen und festhalten, wie Hu und seine Kollegen berichten.
Einsatz in der Medizin
Praktischen Nutzen hätten solche Mikro-Softbots unter anderem in der Medizin: „Uns schwebt vor, dass unser Milliroboter eines Tages Medikamente dorthin transportiert, wo sie gebraucht werden“, sagt Metin Sitti. „Wir wollen ihn bei minimalinvasiven Eingriffen am Patienten einsetzen: entweder, indem der Patient den Roboter schluckt oder wir ihn durch eine kleine Öffnung in der Haut in den Körper einführen. Von dort kann sich der Roboter dann durch den Verdauungstrakt bewegen oder durch die Blase, oder bis zum Herz – uns schweben viele Möglichkeiten vor.“
Mittels solcher Mikro-Softbots hätte ein Chirurg direkten Einblick und Zugang selbst in schwer zugänglichen Bereichen des Körpers. „Ohne chirurgischen Eingriff ist es in vielen Bereichen des Körpers aktuell nicht möglich, sich Zugang zu verschaffen“, erklärt Sitti. Unser Ziel ist es, mit unserem weichen Milliroboter diese Regionen nicht-invasiv erreichbar zu machen, um eine Diagnose erstellen und eine Therapie vornehmen zu können.“
Weitere Miniaturisierung geplant
Erste Tests hat der Mikro-Roboter schon bestanden: Die Forscher steuerten ihn bereits in einer synthetischen Magen-Attrappe und in Hühnchenfleischgewebe. Trotz des unebenen, komplexen Terrains gelang es dem Team, ihren Softbot erfolgreich durch diese Umgebung zu dirigieren. Mit Ultraschall überprüften sie dabei, wo und wie sich der Roboter seinen Weg bahnte.
Bis allerdings solche Mikro-Softbots in der Medizin eingesetzt werden können, sind noch einige Herausforderungen zu bewältigen. Unter anderem wollen die Forscher ihren Roboter noch stärker verkleinern – bis in den Submillimeterbereich. Dann könnten erste Tests in lebenden Geweben und Organen folgen. (Nature, 2018; doi: 10.1038/nature25443)
(Max-Planck-Institut für Intelligente Systeme, 26.01.2018 – NPO)