Industrieroboter übernehmen schon heute Einiges an komplexen Aufgaben. Doch die nächste Robotergeneration soll auch auf unsichere oder veränderliche Randbedingungen reagieren können, wenn beispielsweise zu verarbeitende Teile nur ungenau positioniert sind oder die Verarbeitungsreihenfolge variabel ist. Die neue, an der Fachhochschule Osnabrück entwickelte Plattform „Roboleo“ demonstriert diese Fähigkeiten schon jetzt mit einem Gleichgewichtsspiel.
Roboter sollen sensorgestützt autonome Entscheidungen über Arbeitsschritte und Bewegungsabläufe treffen oder interaktiv kooperieren. Dabei sind Bildverarbeitungssysteme oft von zentraler Bedeutung. Mit Unterstützung der Arbeitsgemeinschaft industrieller Forschungsvereinigungen „Otto von Guericke“ (AiF) haben Wissenschaftler der Fachhochschule Osnabrück die Entwicklungsplattform und Demonstrationsanlage Roboleo entwickelt. Mit ihrer Hilfe werden Objekte in der Umgebung eines Roboters, deren räumliche Lage veränderlich sein kann, durch die Kombination von Bildverarbeitung und Distanzsensorik erkannt und bewegt.
Klötzchen verschieben für das Gleichgewicht
Ein Gleichgewichtsspiel zwischen einem Menschen und einem sehenden Roboter zeigt exemplarisch die Integration der Sensorinformationen in die Robotersteuerung auf. Roboleo basiert auf einer Spielidee, die sich von dem Gleichgewichtsspiel Bamboleo ableitet. Dabei wird eine Spielplatte auf einem Fuß mit kugelförmiger Spitze aufgelegt. Auf der Platte sind Spielsteine mit verschiedenen Formen angeordnet. Entsprechend ihrer Verteilung stellt sich die Platte in eine Gleichgewichtslage ein. Wenn die Spieler abwechselnd Spielsteine von der Platte nehmen, verändert sich die Gleichgewichtslage und die Spielsteine können ins Rutschen geraten. Es verliert der Spieler, der die Platte aus dem Gleichgewicht bringt.
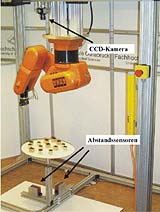
Es wurde ein Algorithmus für die Spielstrategie des Roboters entwickelt, der im Wechsel mit dem menschlichen Spieler interaktiv Spielzüge ausführt. Der Algorithmus baut auf den sensorgestützt errechneten Objektdaten auf. Für die Erkennung der Spielsteine ist über der Spielplatte eine Kamera angebracht. Es werden zwei Arten von Spielsteinen (quaderförmig und zylinderförmig) mit schwarzer Oberseite eingesetzt. Mit Hilfe der Bildverarbeitung werden die Position der Steine auf der Platte und ihre Form ermittelt. Für die vollständige Beschreibung der Position und Orientierung aller Steine muss ferner die Schräglage der Platte bekannt sein. Diese wird mit Hilfe von zwei Distanzsensoren unterhalb der Platte bestimmt.
Anknüpfungspunkte für Anwendungen
Nach Erkennung der Lage sowie der Orientierung von Steinen und Platte entscheidet ein Spielalgorithmus, welchen Stein der Roboter entfernen soll. Die Bildverarbeitung, die Auswertung der Abstandssensorsignale und der Spielalgorithmus sind auf einem PC implementiert. Von dort wird der Robotersteuerung über eine serielle Schnittstelle die Lage des zu entfernenden Steines mitgeteilt. Per Knopfdruck meldet der menschliche Gegner während des Spiels die Freigabe für den nächsten Zug.
Die technischen und methodischen Aufgabenstellungen Roboleos aus den Bereichen Roboterprogrammierung, Bildverarbeitung, Optoelektronik, Sensorintegration und Algorithmen treten in vergleichbarer Form in vielen Roboteranwendungen auf und bieten zahlreiche direkte Anknüpfungspunkte für industrielle Problemstellungen.
(Arbeitsgemeinschaft industrieller Forschungsvereinigungen „Otto von Guericke“ e.V. (AiF), 27.10.2004 – NPO)